
![【未来】ゴキブリが絵を描き、モノを運ぶ。電極を取り付け群れを遠隔操作する技術「Calmbots」筑波大学が開発 [記憶たどり。★]](https://xxx999.net/wp-content/uploads/2020/12/koya_calmbot1.jpg)
※画像は閲覧注意
https://www.itmedia.co.jp/news/articles/2012/01/news098.html
筑波大学の研究チームが開発した「Calmbots」は、ゴキブリに電気刺激を与え遠隔で動きを操作するシステムだ。
触角などに電極を取り付けて小型ロボットのように動かし、絵を描いたり物体を運搬させたりする。
ゴキブリ単体の制御だけでなく、群れとして複数同時に操作もできる。
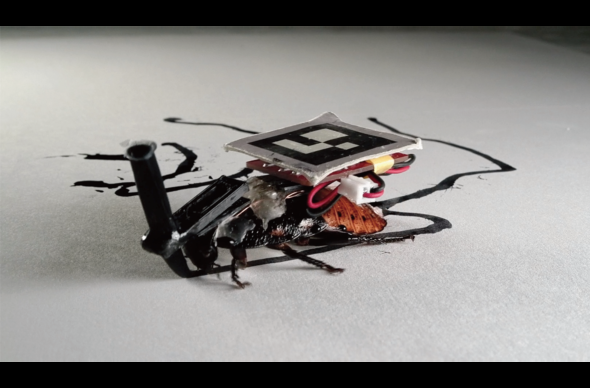
カブトムシのような角を頭部に付け物を動かしている様子
制御するのはマダガスカルゴキブリという種。身体能力が高く、通常のロボットでは得られない、
壁やカーペットなどを移動する能力を備えている。
動作をコントロールするため、本体の前方左右にある「触角」2本、尻尾のように後方左右にある突起「尾角」2本に電極を挿入し、
この4カ所に電気刺激を与える。「両尾角で前進」「両触覚で停止」「右触角で左回転」「左触角で右回転」という電気刺激を与えて制御する。
ゴキブリには手術で電極を埋め込む。手術中動かないよう、氷上に30分置くことで麻酔をかけ、両触角と両尾角の先端を切り落とす。
切り落とした両触覚と両尾角、そして胸部の計5カ所に電極を挿入する。ソケットも背中に装着し、ARマーカー、バッテリー、
通信モジュールを載せる。また頭部には、物体運搬用、描画用などのアタッチメントパーツを取り付ける。
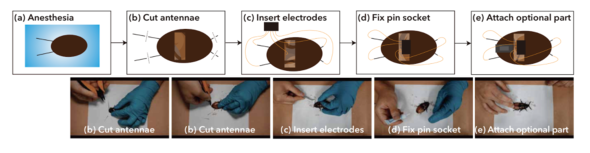
手術工程。麻酔、両触覚と両尾角をカット、5箇所に電極挿入、背中にソケット、頭部にアタッチメントパーツを取り付ける
取り付けたARマーカーを上部のカメラで捉え位置情報を収集する。位置データを基に、ゴキブリの現地点からゴール地点までの
制御コマンドを生成する。集団の場合は、ゴール地点に近い個体に指示する。
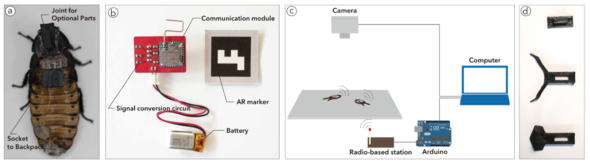
(a)ハードウェア類を装着した状態(b)背中に取り付けるARマーカー、モーター、通信モジュール
(c)上部のカメラからARマーカーを追跡する(d)頭部に付けるアタッチメントパーツ
ゴール方向を向いていない場合、どちらかの触角に電気刺激を与え方向転換させ、ゴールの方向を向いたら両尾角に刺激を与え前進させる。
ゴールから7cm以内に来たら刺激を止める。ゴールの通り過ぎを防ぐためだ。
5cm以内に来たら両触覚に刺激を与え停止させる。到着後は、適宜触覚に刺激を与え、ゴールにとどまるよう制御する。
ゴールから離れすぎるとまた最初に戻り、同じことを繰り返す。
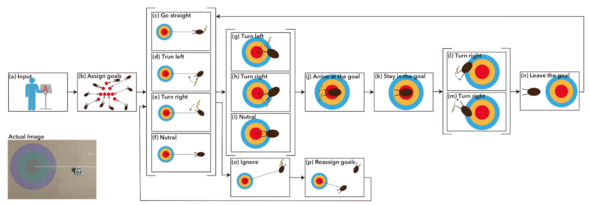
現地点からゴール地点までの制御プロセス
厄介なのが、刺激を与え続けると刺激に慣れて制御不能になることだ。慣れやすさは個体差が大きく、いつ慣れるかの予想もできない。
そのため群れで制御する場合、3.3秒間同じ刺激を与え続けても反応しないときは、他の個体に再割り当てする。
これにより、全体的な目的達成の精度を保持する。
このように複数を同時に制御することで、群れで図形や文字を生成しディプレイとして活用したり、頭部のアタッチメントパーツを使用し、
ペンや筆で線を描いたり、カブトムシの角のようなパーツで物を押して移動させたりを可能にする。
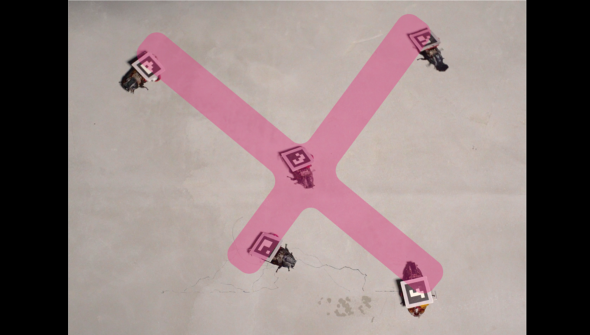
集団で図形や文字を生成する

物を押して運ぶ
筆で描く

普段は見えない場所に隠れて生活しているが、必要な時に呼び出す
Calmbots
https://youtu.be/utXoQBEky3k
できない人いるの?
怖いの?
最強だな
おっかねえなあwww
もう遅い
100年後は富裕層が完全に支配し貧民層にこれつけて奴隷として扱いそうだ
恐ろしい未来が待ってそうだ
不衛生だから掴まない
道端のうんこ掴もうと思わないよね?
どうなの?
_ノ乙(、ン、)_人間に転用できそうですね…
起承転結の転まで用意されているシナリオフレンドリーな設定
引用元: ・【未来】ゴキブリが絵を描き、モノを運ぶ。電極を取り付け群れを遠隔操作する技術「Calmbots」筑波大学が開発 [記憶たどり。★]


![【芸能】SHELLY、本音ポロリ「再婚までいかなくてもパートナーは欲しい」 [フォーエバー★]](https://xxx999.net/wp-content/uploads/2020/08/RWaJbfU-150x150.jpg)
![【コロナ】ワクチン未接種で感染の男性、病床から動画を投稿 「深く後悔している。 打たないのは大間違いだった、打つべきだった」 [影のたけし軍団★]](https://xxx999.net/wp-content/uploads/2021/08/20210808-35174976-cnn-000-2-view-150x150.jpg)